The primary purpose of this project is the realization of Autonomous Transport Vehicles (ATV/ OTA in Turkish) and the necessary human-machine and machine-machine interfaces as well as communication platforms for their integration to the factories of the future. Therefore, the project aims to achieve autonomy both at the ATV level and factory levels.

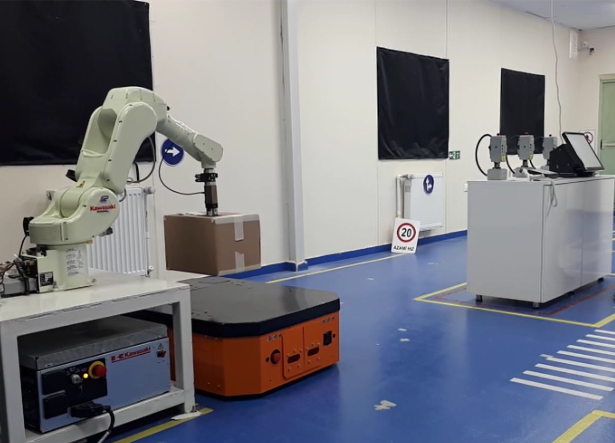
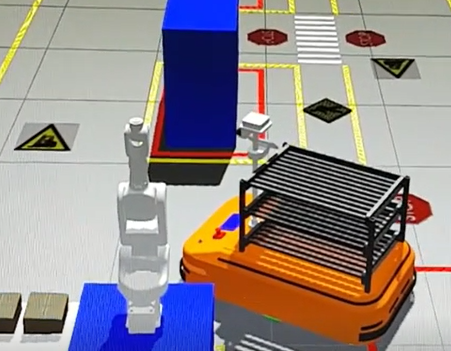
In this Project, the laboratory setup is designed to develop and tests various concepts in the context of Industry 4.0. A factory level intelligent control architecture consists of ATVs, Industrial robots, Human Machine Interface (HMIs) units that communicated to each other via ROS2 middleware. A digital twin of the environment is also created in GAZEBO environment. Additionally, AR, Cloud, Big data applications is also integrated to existing control architecture.
Funding Institution: TUBITAK
 |
 |